Space
DLR GSOC

German Aerospace Center (DLR), institute of space operations & astronaut training and robotics & mechatronics in Oberpfaffenhofen
European Proximity Operations Simulator:
EPOS is a facility for simulation of satellite maneuvers in space, namely rendezvous and docking. The system comprises two industrial 6DOF robots, one being mounted on a rail system which allows an approach range of 25 meters. The real-time control system was specifically designed for this application and supports synchronous and asynchronous position modes via MATLAB/Simulink.
PDF: EPOS - A Robotics-Based Hardware-in-the-Loop Simulator for Simulating Satellite RvD Operations
Video: EPOS - Abschleppdienst im All
Beyond Gravity (formerly RUAG Space)

Beyond Gravity in Emmen (CH)
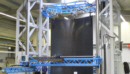
Automated Non-Destructive Ultrasonic Inspection of payload fairings for Ariane 5 und Vega orbital rockets using robotic manipulators:
Our largest installation so far is an inspection system for 5.4 m diameter half-shells. It uses air-coupled ultrasound technique and covers a working area of 20 x 6 x 3 m³. An unequal pair of robots is moving on 24 m rails along the specimen. On its inside we use a Staubli RX170BL robot, where we have exchanged the standard aluminum underarm by a longer CFRP component to extend the reach to 2500 mm. The outside robot with a reach of 5150 mm is a custom design using a highly optimized CFRP upper- und underarm and a 3-axis wrist featuring densely integrated light-weight servo systems as well as laser sintered structural components. Both robots achieve an absolute accuracy of better than 400 microns (RMS) over the whole working range. This system creates C-scan images fully automatically at scan speeds of up to 1 m/s, reducing scan times to less than 20 minutes per square meter. Distance sensors next to the ultrasonic probe alter the trajectories in real time to closely follow the surface of the specimen. A multi-level collision avoidance concept protects the expensive customer part from any damages.
PDF: Presentation of Ultrasonic Inspection System
Video: RUAG Space Composite Center Emmen (our facility starts at 1:59 min)





Beyond Gravity (formerly RUAG Space)
Beyond Gravity in Zuerich (CH)
Non Destructive Inspection:
This automated 10-axis scanner supports the NDI specialists by performing non-destructive inspection of launcher payload-fairings and interstage-adapters using air-coupled ultrasonic through-transmission technology. The result is a C-Scan image of the part, allowing convenient and reliable detection of defects within the part. This machine was developed together with RUAG Space, Eugen Ostertag, Ing.-Buero Dr. Hillger and Robo-Technology.
Key Features:
- Air coupled ultrasonic through transmission, no coupling water needed
- Fully automated scanning of curved and complex shaped spacecraft parts
- Large scan volume of nearly 60 m³
- Laser guided trajectory adaption for highest positioning accuracy in respect to the actual part
- Multiple collision detection and avoidance systems




Aviation
Airbus Helicopters

Airbus Helicopters (formerly Eurocopter)
Dual-Robot Ultrasonic Testing of CFRP and other composite aerospace components:
Over 200 different types of helicopter parts are scanned fully automated by two standard industrial robots. The robots are mounted in a gantry with a travel of 6m. Using water coupling, test methods include through-transmission, pulse-echo and phased array with 64 elements. Both robots are achieving an absolute accuracy of better than 0.5 mm over the working envelope of 7 x 2 x 4 m³. Continuous operation began in 2004, including autonomous night shifts on a regular basis.
MTU Aero Engines

MTU Aero Engines in Munich, Department for non-destructive testing
Charon XRD (X-ray diffractometer):
X-ray diffraction enables the measurement of residual stresses in near-surface areas of metallic workpieces. The diffractometer "Charon XRD" was created in collaboration with General Electric Inspection Technologies. It is used for inspection of components with a high variety of size and geometrical complexity. The facility consists of two 6-axis robots. The first robot carries the x-ray generator and the second robot carries the x-ray detector. The inspection method requires high precision in positioning the robots relative to each other and relative to the specimen. This is realized by a supplemental measurement system based on our patent, which achieves a resolution of 1/1000th mm and 1/10000th degree.
PDF: A New Twin Robot X-ray Diffractometer for Surface Analysis of Complex Aircraft Components



Airbus Helicopters

Airbus Helicopters (formerly Eurocopter)
Air coupled ultrasonic testing station for helicopter tail booms:
The automated air coupled ultrasonic inspection of tubular CRFP sandwich structures is performed by a 10-DOF manipulator specifically designed for the task. It is possible to scan tubes with a diameter between 300 mm and 1100 mm at a velocity of up to 500 mm/s. Since 2012 this facility is integrated in the series production and inspects all tail booms of the Airbus Helicopters model EC145 T2.
PDF: Automated Air-Coupled Ultrasonic Technique for the Inspection of the EC145 Tail Boom



Semiconductor and Electronics
Evatec

Evatec Process Systems (CH)
Substrate Handling:
This cassette-to-cassette wafer handling completes the flexible sputter tool LLS EVO II from Evatec with a fully automated cassette-to-cassette handling. It is available for different wafer sizes up to 8" and with various options including wafer masking, flat/notch alignment and bar code reader.
Key features:
- Fully automated cassette-to-cassette handling
- Cleanroom Class 10 certified robot
- Very small footprint


Rohde & Schwarz

Rohde & Schwarz in Teisnach
PCB Prober:
Radio frequency filters directly integrated in PCBs (Printed Circuit Boards) are realised at ever increasing frequencies. Testing those elements is an important step during the demanding production process. The robotic PCB prober automates the testing of circuits for frequencies of up to 67 GHz.
Key features:
- Probing accuracy better than 10 microns in relation to the PCB
- Laser guided probe positioning
- Easy setup of new PCBs by graphical user interface
- Seamless integration in existing production control architecture



Evatec

Evatec Process Systems (CH)
SDS 231 Wafer Handling:
This double robot handling has been developed for the flexible cassette-to-cassette loading of an SDS 231 sputtering system. It allows to process 6- and 8-inch wafers which can be coated on either side. The wafers get masked, enabling a deposition with "edge exclusion”.
Key features:
- Automated cassette-to-cassette operation
- Mixed processing of 6 "and 8" wafers possible
- Masked deposition for edge exclusion
- Frontside and backside metallization



Oerlikon Systems

Oerlikon Systems
Racetrack Disk Handling:
This robot-based cassette-to-cassette handling for HDD substrates was developed for the fully automated feeding of a high-speed HDD coating system. The core element is a fast 6-axis robot (Adept Viper s650 CR) and it uses a modular servo-based cassette conveyor system.
Key features:
- Feeding of up to 1200 HDD substrates per hour
- Integrates seamlessly into fully automated HDD production lines
- Developed for cleanroom class 10
- Very small footprint: 2.6 x 4 feet
Research
Ferdinand-Braun-Institut (FBH) in Berlin

Ferdinand-Braun-Institut gGmbH
Leibniz-Institut für Höchstfrequenztechnik
Mikromontage:
The Ferdinand-Braun-Institut (FBH), Leibniz Institut für Höchstfrequenztechnik in Berlin carries out R&D activities that aim at bringing quantum technology from proof-of-concept demonstrations in a quantum optics lab to industry, so as to pave the way for the second quantum revolution to unfold its potential for tomorrow’s society. Within this scope FBH with its Joint Lab Quantum Photonics Components is developing highly integrated miniaturized laser modules for applications in quantum technologies - especially for operation in harsh environments such as space.
During the assembly of the modules, very small micro-optical and opto-electronic components are positioned on a miniature optical bench by micromanipulators, whereby accuracies of less than 100 nm must be achieved. The assembly of a module requires a multitude of very complex processes for alignment, calibration and characterization.
Using the robotic system supplied by Robo-Technology, the operator is assisted in his manual tasks by high-precision industrial robots. In addition, the use of advanced HMI methods and operating concepts allow for intuitive operation. This type of collaboration between the human and the robotic environment provides an extremely versatile (wide variety of products) and agile (fast changeover between products without setup time) manufacturing environment. No product-specific programming of the system is required.
Video FBH: Labtour Integrated Quantum Technology - a look behind the scenes



DLR KN

German Aerospace Center (DLR), Institute of Communications and Navigation in Oberpfaffenhofen
ARGOS / VABENE Coarse Pointing Assembly:
Very precise dynamic dual-axis autotracking of a laser beam for optical data transmission from an airplane to earth. Proven reliability demonstrated during various campaigns, including operation onboard a Dornier Do 228.
PDF: Optical Data Downlinks from Earth Observation Platforms



DLR Space Administration
DLR Space Administration
mm Radar4Space:
A new imaging technology based on mm-wave radar was developed in a joint research project with Goethe University Frankfurt, Ferdinand-Braun-Institut, Leibniz-Institut für Höchstfrequenztechnik in Berlin and Friedrich-Alexander-University in Erlangen. It enables a service satellite to detect and precisely locate other satellites or space debris. The University of Frankfurt currently designs radar sensors with a modular architecture using this technology. These sensors can be installed at various places on a service satellite. Antenna und front-end electronics are integrated in compact modules, only the imagine data processing takes place in a central module outside of the antenna module. The system can detect other objects at a distance of 1000 m. In the close-up range (under 20 m) it is possible to create 3D pictures in real-time.
PDF: Real-Time Data Acquisition and Signal Processing of a Multistatic mm-Wave Radar System
DLR KN

German Aerospace Center (DLR), Institute of Communications and Navigation in Oberpfaffenhofen
Transportable Optical Ground Station TOGS:
Mobile ground station for optical up- and downlinks with high bandwidth (10 GBit/s). The device can be deployed within minutes and can establish a connection to a satellite, to a stratospheric platform or to an airplane over a distance of more than 100 km. TOGS has proven its service during a lot of research projects such as ARGOS, VABENE and DODfast.



DLR KN

German Aerospace Center (DLR), Institute of Communications and Navigation in Oberpfaffenhofen
CAPANINA Coarse Pointing Assembly:
Very precise dual-axis autotracking of a laser beam used for high bandwidth optical data transmission (1.25 GBits/s) from the stratosphere down to earth. Successful maiden flight in 2004 on a research balloon operating from a height of 23 km over a total distance of up to 64 km.


Fraunhofer IIS

Fraunhofer Institute for Integrated Circuits in Fuerth:
Mobile x-ray scan (x-ray computed tomography) with two standard industrial robots:
Very large objects (e.g. wings, rudders, etc) can be inspected on-site by this mobile x‑ray CT scanner. While one robot is pointing the source, the other one aligns the detector accordingly. Precise positioning and synchronization of the robots is necessary to achieve high quality CT results.